Invited Symposium: Nonlinear Dynamical Systems in Psychiatry
| INABIS '98 Home Page | Your Session | Symposia & Poster Sessions | Plenary Sessions | Exhibitors' Foyer | Personal Itinerary | New Search |
Discussion and Conclusion
Physiologists have long known that rodents can dynamically maintain either a high body weight or a low one, according to the specific conditions of their environmental context (Le Magnen, 1985). This non-homeostatic regulation takes into account the past and the present, but also the future states of the animal and of the environment (McFarland & Boesser, 1993). However, if the environment may often be roughly predictable at a high level of integration - i.e., the alternations of luminosity between night and day - this may not be the case at a lower level - i.e., the fluctuations of luminosity within an hour. The two systems of action selection in mice might serve to cope with such different circumstances, the first one being adapted to a predictable context, the second one being adapted to unpredictable features of the ongoing situation.
According to this hypothesis, periodic System I is adapted to the long-term changes of the environment. It does not take into account the details of the context and affords the animals - which, at such a level of integration, may be all considered as experiencing the same environmental situation - a net gain of high value, by selecting their global rest and activity states. Chaotic System II, operating in parallel with System I, may be adapted to short-term changes of the ongoing environmental context. Because each animals is in - or starts from - a specific precise situation, this system generates different behavioral trajectories for each animal, with different consequences as far as energy is concerned (Fig.5). Accordingly, one possible function of action selection mechanisms in mice is to dynamically adapt their metabolic needs to environmental changes, both in their unpredictable dimension and on their more predictable aspect.
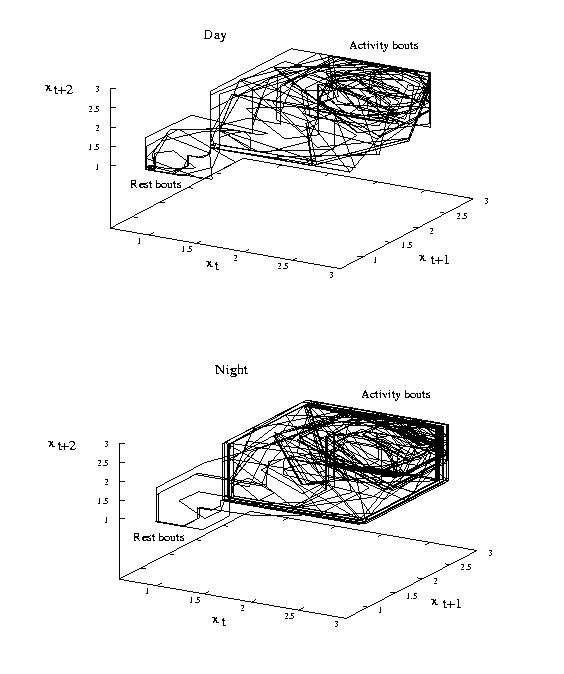 Fig. 5. 3D phase portraits of a whole diurnal (top) and nocturnal (bottom) behavioral sequence (with rest and activity bouts). System I might control the switch between rest and activity bouts; System II might control the switch between acts within activity (and rest?) bouts.
Fig. 5. 3D phase portraits of a whole diurnal (top) and nocturnal (bottom) behavioral sequence (with rest and activity bouts). System I might control the switch between rest and activity bouts; System II might control the switch between acts within activity (and rest?) bouts.
Although the possibility of a chaotic dynamic system has already been mentioned in relation to decision making in humans (Guastello, 1995), such is not the case with animals. However, this type of system is a good candidate for this kind of task, because it makes it possible to trigger rapid transitions from act to act, to escape from a given attractor, and to facilitate non-perseveration (Lloyd & Lloyd, 1995; Kelso, 1995). It may also help to track the ongoing novelties of the situation (Skarda & Freeman, 1987).
An applied perspective of this work is to implement such a biologically inspired architecture into a new generation of autonomous robots - or 'animats'. As of today, some of these robots are able to carry out a given simple task like, for example, gathering some scattered material in a given place while avoiding fixed obstacles (Guillot & Meyer, 1998). However, they still have difficulties performing several conflicting tasks in an unpredictable environment, while being able - as mice do - to dynamically maintain a sufficient energy level.
Finally, one less specific hypothesis suggested by this work is that apparently conflicting results indicating either periodicity, or chaos, or stochasticity in pathologic behaviors might refer to the dysfunction of different control systems of action selection, that operate at different integration levels. Promising directions for future research may stem from such a point of view.
| <= Results | DISCUSSION & CONCLUSSIONS | References => |
| Discussion Board | Next Page | Your Symposium |